WORKS
2025
径展開機構 (Diameter Deployment Mechanism)
TPU製の板を一輪で15本使用し、タイヤを収縮させることで直径を変化させることができます。
走行中でも径を変化させることができるため、左右のタイヤの径に差をつけることで方向転換を行うことができます。
半球状ホイール (Hemispherical Wheel)

半球状オムニホイールの改良版です。
従来の半球状オムニホイールは、オムニホイールのローラーが構造上、適切に機能していませんでした。
改良版では、オムニホイールのローラーを突起に置き換えることで、この問題を解決しました。
今後、実験を行い改良を行っていく予定です。
展開手裏剣ホイール V3 (Deployable Shuriken Wheel V3)
展開手裏剣ホイールの改良版です。
従来は荷重によって自作のガイドキャリッジが破損することが多く、耐久性に問題がありました。
改良版では、ステンレス軸を用いることで破損の多かったガイドキャリッジを取り除くことができました。
ミニロボ (MiniRobot)
できるだけ小さく、安価で、ある程度の出力を出せるように設計したロボットです。
実際には手のひらにギリギリ乗らないサイズで、ちょこっと安価で、出力がイマイチなロボットになりました。
蛇だるま ~干支だるま~ (Snake Daruma)

毎年恒例の干支だるま。蛇だるまです。
2024
クローラ (Crawler)
自作の搭乗可能なクローラです。
TPUで履帯を自作し、PS4コントローラで操作が行えます。
時速2~3kmで約80kgまでの荷物を運搬することが可能です。
Maker Faire Tokyo 2024

Maker Faire Tokyo 2024に参加しました。
マニアックな作品から情熱的な作品まで、たくさんの創作物を見ることができ、とても楽しかったです。
展開手裏剣ホイール V2 (Deployable Shuriken Wheel V2)
展開手裏剣ホイールの改良版です。
大幅な小型化と、展開機構の改良を行いました。
小型化のために自作したガイドキャリッジに耐久性がなかったため、人が乗ることはできませんでした。
今後、改善を行っていく予定です。
半球状オムニホイール (Hemispherical omniwheel)
軽微な段差や不整地を走行できるオムニホイールの拡張的な足回りを目指して製作しました。
鉄粉パンジャンドラム (Iron-powdered Panjandrum)
鉄粉の練り込まれたフィラメントで製作したパンジャンドラムです。
動物基板キーホルダー (Animal Substrate Keychain)

動物型の基板キーホルダーです。
LEDの目が光ります。
段差攻略機構 (Step attack robot)
段差や不整地での走行が可能な足回りです。
TPU製のタイヤ表面にゴムシートを接着して安定した走行を実現しています。スマホから遠隔で操作ができ、レスキューロボットなどの分野での活躍を視野に制作しました。
展開メカナムホイール V4 (Deployment Mecanum Wheel V4)
展開メカナムホイール V3の改良版です。
V3では試作的に制作していたため、無駄な箇所が多く、1ユニットが大きくなっていました。そのため、V4では小型化、軽量化を目指して制作を行いました。
改良によって、機能はそのままに、大幅な小型化、軽量化を実現することができました。
無関節アーム V2 (Unarticulated Arm V2)
ペットのおもちゃから子供や高齢の方とのコミュニケーションロボットなどの触れ合いが多く、柔軟性を必要とされる現場で使われるロボットの新しいアームの作成を目標に製作しました。
V1ではPLAフィラメントを使用していますが、長期間の使用で折れてしまう事があるため、V2では細いホースを使っています。
自由度を制限する代わりに、一つのアクチュエータで優しく掴む動作を実現しました。今後は小型化を進めたいと考えています。
辰だるま ~干支だるま~ (Dragon Daruma)

毎年恒例の干支だるま。辰だるまです。
2023
NHK高専ロボコン2023 全国大会 (NHK Robot Contest 2023 national congress)
アイデア対決・全国高等専門学校ロボットコンテスト2023 全国大会 もぎもぎフルーツGOラウンドにて全高専の中で唯一の足回りを縮めるアイデアが評価され、本田技研工業株式会社から特別賞とを頂きました。
国技館の独特の緊張感を体感することができ、素晴らしい経験となりました。また、他高専の学生との交流は新たな刺激となりました。
地区大会からの一ヶ月で足回りのオムニホイールを自作の22.5度傾いたメカナムホイールに変更しました。直進性とロープ越えの精度が大幅に向上しました。
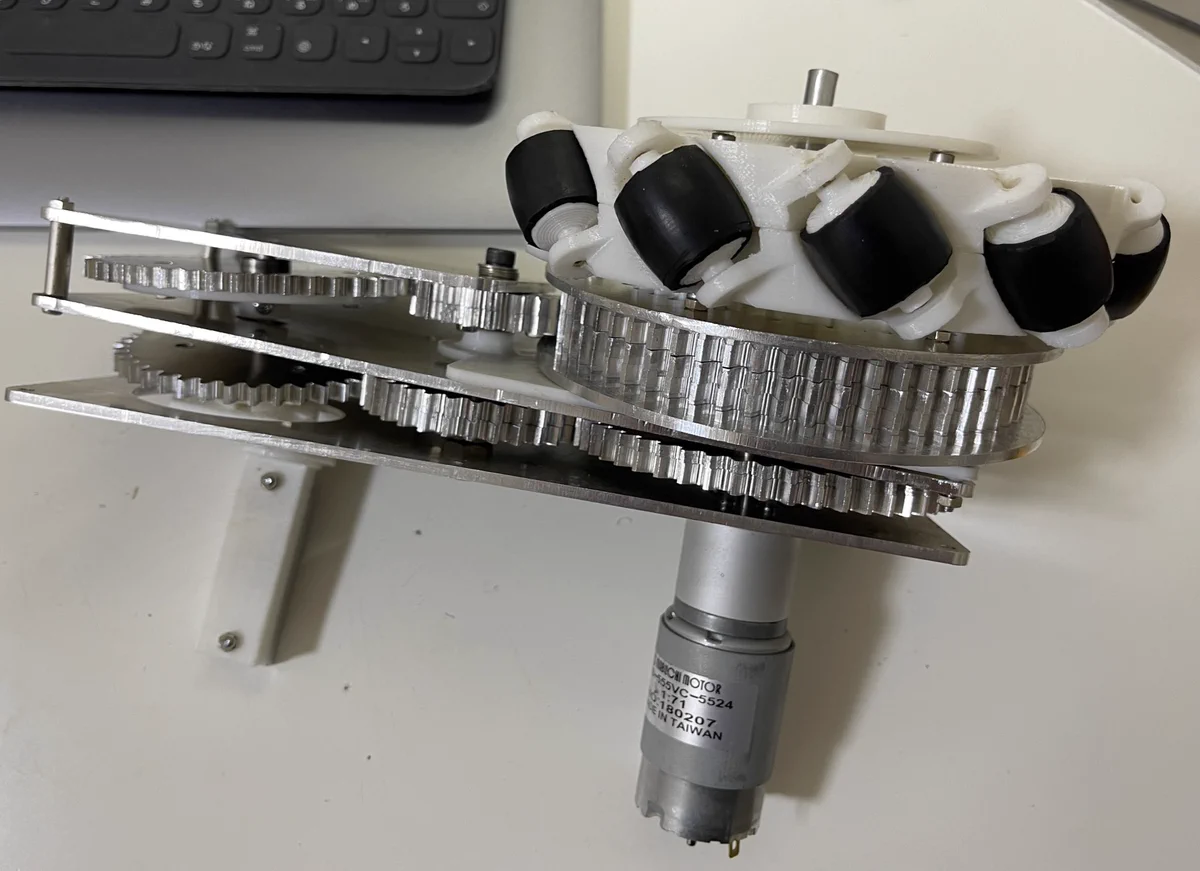
NHK高専ロボコン2023 関東甲信越大会 (NHK Robot Contest 2023 Kanto Koshinetsu)
アイデア対決・全国高等専門学校ロボットコンテスト2023関東甲信越地区大会 もぎもぎフルーツGOラウンドにてアイデア賞と全国大会への推薦を頂きました。
足回りの設計、製造を行いました。内部では44枚のCNCで切削したアルミ製のギアが回転し、段差を越えるためのグローサーを足回りと連動させて駆動します。
足回りを縮めるアイデアが評価につながり、全国大会への推薦を頂きました。2022年の雪辱を果たすと共に、最後まで支えてくださった方々への恩返しができ良かったです。
Maker Faire Tokyo 2023
Maker Faire Tokyo 2023に株式会社CuboRexの展示ブースにて展開式メカナムホイールを展示しました。
展開メカナムホイール V3 (Deployment Mecanum Wheel V3)
段差や不整地の走行と平面での全方向移動の実現を目的とした足回りです。
ロック機構を送りネジにしたことで現実的な機構になりました.
メカナムホイールのローラーには熱収縮チューブを使用しており、これによってローラーのサイズにとらわれる事のないホイールの設計が行えます。
3輪オムニホイール (3-Wheel Omniwheel)
アルミ材と3Dプリンター部品で構成されている3輪のオムニホイールです。ESP32を用いて制御を行っています。
スマートフォンからBLEで操作することができ、高い精度での操作を行うことができます。
軸にタップ加工をした事でオムニホイールを直接固定しています。これによってスペースの削減やメンテナンス性を向上させる事ができました。
展開手裏剣ホイール (Deployment Shuriken Wheel)
3つの羽が中心のギアによって展開し、展開後に羽の上を移動しながら進む足回りです。雪原や砂地をラクダのように力を分散させながら移動することを目標に製作しました。
ギアが垂直に噛み合わないと動作がスムーズに行えないため、ベアリングを設置して姿勢を維持しています。
ホイールの重心や摩擦の調整を行う必要がありますが、目標の動作を実現させることができました。
メカナムオムニホイールロッカーボギー機構 (Mecanum Omni-Wheel Rocker Bogie Mechanism)

ロッカーボギー機構をベースに4輪をメカナムホイール、後方2輪にオムニホイールを搭載した足回りです。
従来のロッカーボギー機構では足回りユニットに独立ステアリング機構を搭載することが一般的ですが、それではアクチュエータの個数が増えてしまうため、整備された環境での使用を限定し、アクチュエータの個数を減らすことを目的として製作しました。
フレームは3Dプリンターで製作し、回転軸はアルミ棒を使用しています。
TPUパンジャン (TPU Panjandrum)
TPUフィラメントで製作したパンジャンドラムです。
とても柔軟で強い衝撃にも耐える事ができます。
誰でも猫ちゃん雪だるま製造機 (Snowman Maker)

誰でも可愛い猫型雪だるまが作れます。
雪の水分量によって型にくっついてしまう問題があり、改善に2年を要しました。今後も更なる改善を目指したいと考えています。
無関節アーム (Unarticulated Arm)
ペットのおもちゃから子供や高齢の方とのコミュニケーションロボットなどの触れ合いが多く、柔軟性を必要とされる現場で使われるロボットの新しいアームの作成を目標に製作しました。
実験ではPLAフィラメントを使用していますが、長期間の使用で折れてしまう事があるため、素材の剪定が重要です。
物体のねじれを利用してアクチュエータを差動的に配置することで、半球面上にアームを制御する事ができます。おもちゃなどの少ないアクチュエータでの動作が必要な場合は、ギアの組み合わせで限定した動作を実現できます。
多くのロボットアームには関節が多く、日常生活で触れ合うには危険ですがこのアームは関節を持たず、ぶつかっても柔軟であるため怪我や事故を大幅に減らす事ができます。
内歯車ホイール (Internal Gear Wheel)
楕円形の内歯車が内蔵されている羽をアクチュエータのついたギアで乗り上げることで移動する足回り機構です。雪原や砂地をラクダのように力を分散させながら移動することを目標に製作しました。
水泳のクロールのように、移動フェーズと次の移動のために羽自体を回転させるフェーズに分かれています。
実際に乗ってみると、水平移動と急な羽の回転による停止が今までにない動きで、とても印象的でした。
卯だるま ~干支だるま~ (Rabbit Daruma)

毎年恒例の干支だるま。卯だるまです。
2022
ブルーハワイミニパンジャン (Blue Hawaii Mini Panjandrum)

シルクPLAで製作したミニパンジャンドラムです。
通常のPLAよりもゆっくり3Dプリンターを動かす事で、綺麗に印刷する事ができました。
CuboRex meetup
CuboRex meetupに参加しました。Maker Faire Tokyo 2022では聞けなかった詳しいお話が聞けて楽しかったです。
Maker Faire Tokyo 2022

Maker Faire Tokyo 2022に参加させて頂き、Young Maker Challenge 2022にて優秀賞をいただきました。
多くの独創的なアイデアや卓越した技術力を間近で見る事ができ、創作意欲が湧きました。
ラジコンパンジャン V2 (Radio Control Panjandrum V2)
385モータで駆動するラジコンパンジャンです。ESPで制御を行い、BLEでスマートフォンから操作することができます。
本体に入っている重りで姿勢を保つことで、不安定な形状でありながらスムーズな動作を実現しています。
展開メカナムホイール V2 (Deployment Mecanum Wheel V2)
状態を維持するためのロック機構を、主軸の回転をホイールに伝えることで行う機構を製作しました。
従来は直動機構で行うためにエアシリンダーなどを用いることを想定して製作していましたが、この機構ではサーボモータなどの低出力のアクチュエータで行えます。
前回からの改善点として、3Dプリンターで製作したギアの精度が悪く、想定通りの動きを実現できなかったため、すべてのギアをアルミ板から切削して製作しました。
CNCパーツ集 (CNC Parts Collection)
CNCパーツ集です。t5とt3のアルミ板の切削です。
メカナムホイールの足回り (Mecanum Wheel Undercarriage)

NHK高専ロボコンで作成したメカナムホイールの足回りです。735モータで駆動します。
剛性を保つために足回りユニットをCNCフライス盤でt5のアルミ板から切削して製作しました。
角材の固定位置にはポケット加工をすることで、ずれる事なく固定する事ができます。
重心移動足回り (Center of Gravity Shift Undercarriage)
中央のギアに連動して羽が回転し、回転した羽が全体の重心を回転方向に移動させることで駆動します。
寅だるま ~干支だるま~ (Tiger Daruma)

毎年恒例の干支だるま。寅だるまです。
2021
アラカワンダー (Arakawander)
NHK高専ロボコンで作成したアラカワンダーの頭と胴体のロボットです。ラックギアで頭が上に上昇します。3Dプリンターで形を作っています。
Maker Faire Tokyo 2021
Maker Faire Tokyo 2021にオンラインで参加させて頂いた際の動画です。当日はコロナウイルスでオンライン開催になってしまいました。
ラジコンパンジャン V1 (Radio Control Panjandrum V1)
385モータで駆動するラジコンパンジャンの初号機です。ESPで制御を行い、BLEでスマートフォンで操作することができます。
少しぎこちないですが、操作する事ができます。
アルミパンジャン (Aluminum Panjandrum)

t5のアルミ板を切削して製作したアルミ製のパンジャンドラムです。
重量感があり、安定して転がります。
マイクロビットソード (Microbit Sword)
マイクロビットを3Dプリンターで製作した剣にくっつけました。剣を振るとパソコン上の敵と戦うことができます。
モーションによって攻撃と防御を出すことができ、子供達に好評でした。
マイクロビットとスクラッチで完結するため、プログラミング教育に導入しやいと感じます。
ベアリングパンジャン (Bearing Panjandrum)
ベアリングを内蔵し、車輪が回転するパンジャンドラムです。
展開メカナムホイール V1 (Deployment Mecanum Wheel V2)
段差や不整地の走行と平面での全方向移動の実現を目的とした足回りです。
ロック機構をエアシリンダーで構成しました。アクチュエータが多いことやそれによって重くなってしまったことが改善点として挙げられます。
メカナムホイールと展開後の状態の二つを考慮して設計する必要があるた、多くの試作を行いました。
ゴム関節 (Rubber Joint)
球体関節をゴムを利用して実現させた機構です。
ゴムの強さによって関節の可動のしやすさを調整する事ができます。
青パンジャン (Blue Panjandrum)

青色のパンジャンドラムです。
トカゲロボ (Lizard Robot)
トカゲ型のロボットです。サーボモーターで関節を動かすことができ、実際のトカゲの骨格を参考にして製作しました。
足先にウレタンで製作したカバーをつけるなど試しましたが、スムーズな動作ができませんでした。適切な分量でウレタンを製作する必要があり、とても勉強になりました。
脚 (Leg)
猫の脚を参考に製作しました。脚の構造はとても奥が深く突き詰める事の難しさを痛感しました。
丑だるま ~干支だるま~ (Cow Daruma)

毎年恒例の干支だるま。丑だるまです。
2020
ポンデパンジャン (Pondering Panjandrum)

ポンデリングのパンジャンドラムです。とても可愛くて美味しいです。
ガラク隊 (Junk Corps)

NHK高専ロボコンで作成したガラク隊です。テトリスのBGMを演奏します。
非常停止カメさん (Emergency Stop Turtle)
非常停止ボタンを固定することのできるカメ型の置物です。可愛いです。
木刀 (Wooden Sword)
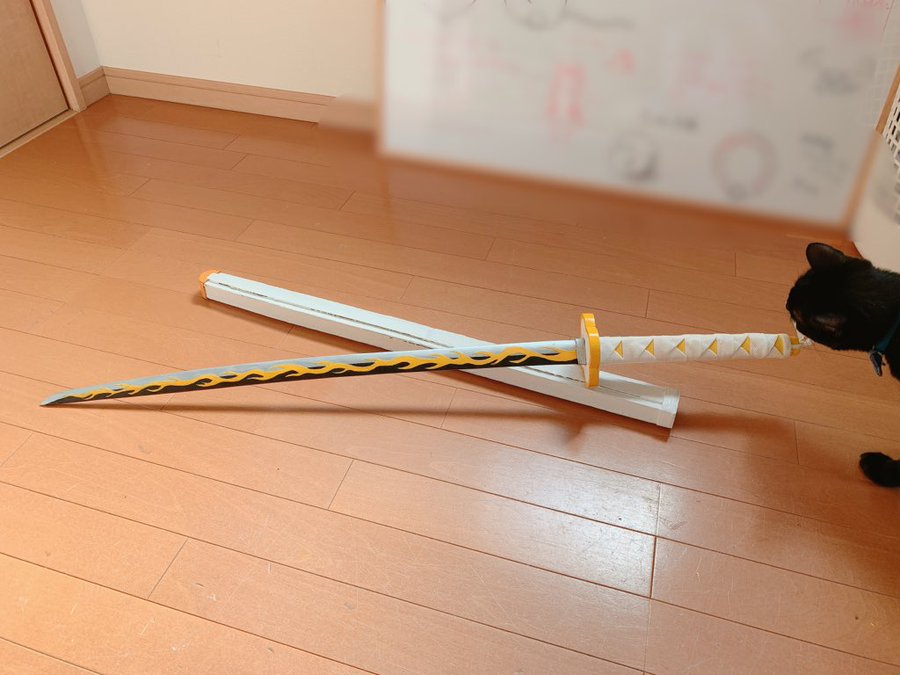
刀です。